Cada uno de estos bloques realiza una función en el sistema.
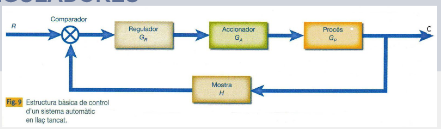
El proceso : se refiere a calentar la superficie hasta la tª deseada
El accionador: será el elemento que o dispositivo que actúa (resistencia eléctrica).
La muestra (captador, sensor): será el elemento que permitar medir la variable a controlar (Termistor, sonda ....)
El comparador obtiene la diferencia entre la señal medida y el valor de referencia R, esta señal se conoce como señal de error.
El regulador o controlador nos permite adecuar la función de transferencia más idónea para realizar el proceso .
Si calculamos la función de transferencia, obtenemos:


Régimen transitorio: hasta que el sistema alcanza un valor estable.
Régimen permanente: se mantiene la respuesta del sistema

Proporcional P: Nuestra impresora necesita una temperatura de 220º y en este momento estamos a 50º, en ese caso necesitaremos una respuesta más rápida que si estamos a 200º la salida es proporcional a la entrada. Para implementarlo necesitaremos multiplicar el error por un factor K.
El valor de K influye en la velocidad de respuesta. Si K es pequeña tardará mucho en conseguir el valor deseado. Si aumentamos K, el sistema responde con más rapidez pero cuidado, tarda más en estabilizarse. Si es excessivamente grande el sistema oscila y pasa a ser inestable.
Otro problema es que presenta diferencias en régimen permanente entre el punto de referencia y la respuesta OFFSET, es decir, no elimina el error a largo plazo existe diferencia entre el valor de referencia y el valor conseguido .
En la página de Luís Llamas podemos ver que efecto produce el bloque proporcional
https://www.luisllamas.es/teoria-de-control-en-arduino-el-controlador-pid/
Desplázate hasta el simulador

Integral I: anula el error en régimen permanente, lento. No se utiliza solo.Tiene en cuenta el "pasado"
Derivativo D: se anticipa al error, tiene en cuenta el futuro, "predice", sensible al ruido. No se utiliza solo.
PI:elimina automáticamente el OFFSET.
El componente integral aplica una acción que es proporcional a la integral del error a lo largo del tiempo. Equivalentemente, responde proporcionalmente a la suma de todos los errores anteriores. Permite al controlador eliminar por completo el error a largo plazo. Sin embargo, si Ki es muy pequeño, el sistema tardará mucho en eliminar el error.
Ajusta en el simulador el valor de Ki y comprueba el resultado
Además, el componente derivado responde muy mal al ruido de la medición. El ruido, una variación de alta frecuencia, supone variaciones muy rápidas, aunque sean de pequeña amplitud. Estas variaciones son amplificadas por el componente derivado.
Comprueba su efecto en el simulador.
PID: Combina los tres anteriores, resultado óptimo.
P: reduce las oscilaciones en reg. Transitorio.
D : actúa rápidamente para corregir los cambios durante el reg. permanente como consecuencia de una
perturbación externa.
I: corrige automáticamente el OFFSET y ajusta la variable al punto de referencia.
