Ara ja coneixem com treballar amb TINKERCAD , i si volem moure un motor com el que tenim en el cotxe?
La primera idea seria connectar-lo directament a la placa arduino








La primera idea seria connectar-lo directament a la placa arduino

escriurem un programa senzill que active el motor
void setup()
{
pinMode(5, OUTPUT);
}
void loop()
{
digitalWrite(5, HIGH);
}
Si iniciem la simulació comprovarem que l'eix del motor gira i a més ens indica amb quina velocitat , en aquest cas 51 rpm (voltes per minut) , d'entrada ja veiem que té poca velocitat i també que sempre gira en el mateix sentit (en el cas real tenim molt poca potència no podrem per exemple fer avançar el cotxe).

La pregunta que ens fem ara és: tenim algun element amb el que puguem obtindre més velocitat i treball en els dos sentits de gir???
Com ja imagineu la resposta és si, el L293D
en classe l'utilitzarem amb aquest format
però com en el simulador no el tenim utilitzarem el primer.
Sempre que utilitzem un circuit integrat cal consultar quina funció té cadascun dels seus terminals
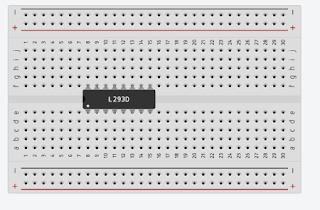
Com el connectarem
1. El posem sobre la placa board en la zona central
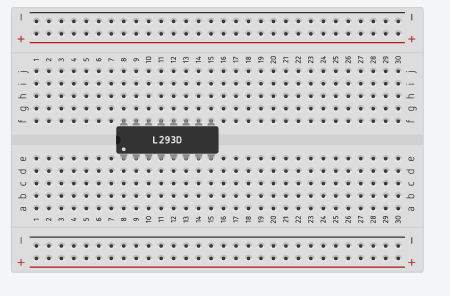
2. Connectem els terminals de GND i l'alimentació de 5V a Arduino

3. Connectem els motors si mirem l'esquema van entre la 3-6 i entre 11-14

4. Connectem en el terminal 8 una alimentació adicional per la motors, recordeu que tots els GND (negatius) del circuit cal que es connectats junts.

esta pila s'encarregarà d'alimentar als motors.
En l'altra sessió veure'm com es controla cada motor des de ARDUINO