
Vamos avanzando y nuestro robot ya casi está montado , ahora calibraremos los motores de forma que cada articulación del robot(base, hombro, codo y pinza) pueda realizar sin problemas el recorrido de 180º.
Para ello utilizaremos el IDEde Arduino
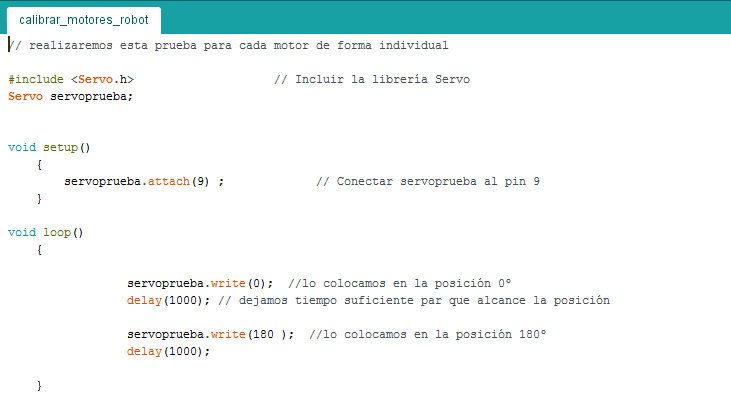
Recordad probarlo para cada uno de los motores conectados, podéis copiar el código
// realizaremos esta prueba para cada motor de forma individual
#include // Incluir la librería Servo
Servo servoprueba;
void setup()
{
servoprueba.attach(9) ; // Conectar servoprueba al pin 9
}
void loop()
{
servoprueba.write(0); //lo colocamos en la posición 0º
delay(1000); // dejamos tiempo suficiente par que alcance la posición
servoprueba.write(180 ); //lo colocamos en la posición 180º
delay(1000);
}
